Obojživelný robot se umí pohybovat ve vodě, na ledu i na suchu. Využít ho chce i americké námořnictvo


Roboti dnes pronikají do stále více oblastí lidské činnosti. Zároveň se stále více v robotice využívá tzv. biomimetika, která zkoumá zajímavá konstrukční řešení u živých organismů v přírodě a snaží se je pak přenést do nových technických vynálezů, v tomto případě všemožných robotů. Dokonalou demonstrací této praktiky je obojživelný a netradičně vyhlížející robot Velox od americké firmy Pliant Energy Systems.
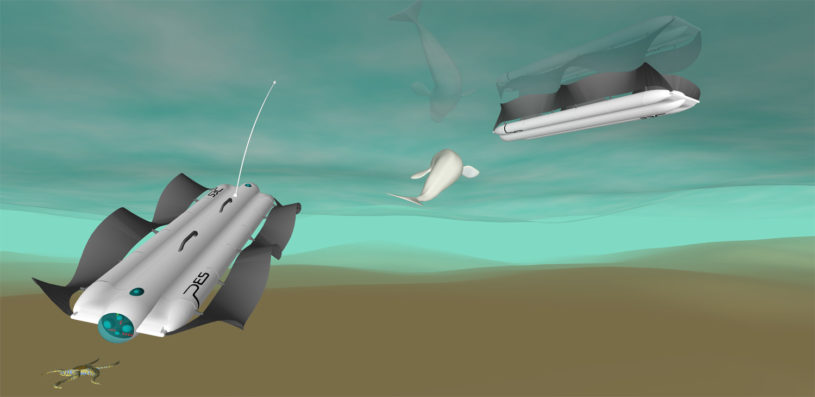
Nejde zdaleka o prvního robota, který se nechal inspirovat živočišnou říší. Proti mnoha výtvorům, které se například inspirovaly u ryb a umí tak skvěle plavat, ale kombinuje Velox hned několik pohybových řešení pro různá prostředí a připomíná tak hned několik živočichů. Velox totiž podle svých tvůrců plave jako rejnok, leze jako stonožka, plazí se jako had a odstrkuje se jako oliheň.
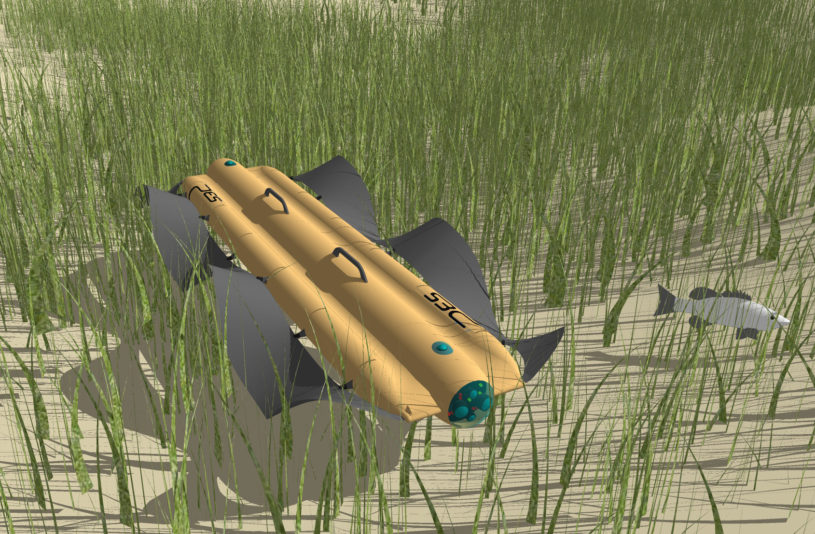
Klíčovou součástí podlouhlého a úzkého robota je dvojice silikonových ploutví, které pohání servo a Veloxu slouží pro pohyb jak v moři, tak na ledu i na souši. Podle potřeby je vždy jen různě sklopí a rozvlní je, aby se co nejlépe přizpůsobil danému prostředí. Zatímco ve vodě mu tedy budou sloužit vodorovně jako klasické rybí ploutve, jakmile doputuje na pevninu, ploutve sklopí a opět vlnivým pohybem se díky nim bude přesouvat dál. Na ledu je pak postaví kolmo proti ledové ploše a poradí si i s kluzkým povrchem.
„Velox umí využít několik typů pohybu, které můžeme najít ve zvířecí říši, a to jen za použití jednoho páru ploutví,“ vysvětluje pro magazín Digital Trends Benjamin „Pietro“ Filardo, zakladatel a CEO Pliant Energy Systems. „Ploutve lze nejlépe popsat jako čtyřdimenzionální objekty s hyperbolickou geometrií, která robotovi umožňuje plavat jako rejnok, lézt jako stonožka, plazit se jako had a odstrkovat se jako oliheň a dodává mu nebývalou svobodu pohybovat se při jediné misi v různých prostředích.“
Zmíněná mise není náhodná. Vývoj a výzkum související s obojživelným robotem totiž podporuje Úřad výzkumu amerického námořnictva, který zkoumá možné využití podobných robotů pro své účely. Filardo má sice v hlavě také možnou komercializaci a hledá další potenciální partnery, ale aktuální model Velox má představovat ověření konceptu, že podobný univerzální robot může posloužit pro různé účely.
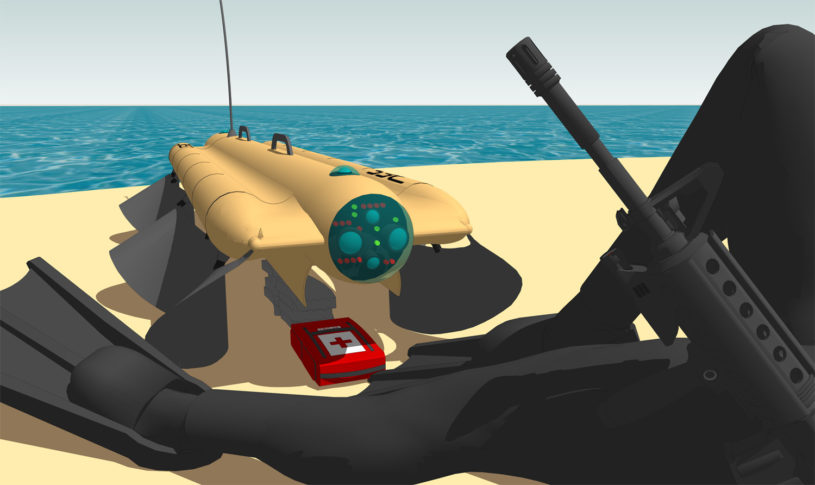
Velox může být využíván například pro průzkum korálových útesů nebo lovení dravých ryb, pro které je potřeba maximální mrštnost a obratnost, což robot od Pliant Energy Systems splňuje. Využití najde i při natáčení divoké zvěře nebo v polárních misích a při záchranných misích, kdy dokáže například hodit lano topícímu se člověku pod ledem. Zmíněné námořnictvo ho pak může využít v misích, kde se operuje na moři i na pevnině například pro doručení různých zásob, a zároveň může díky integrované kameře provádět na dálku inspekci terénu.
Prozatím je třeba Veloxu pokyny o jeho dalším pohybu zadávat ručně, ale cílem Benjamina Filarda a jeho týmu je vytvoření zcela autonomního robota, který by dokázal v jakémkoliv prostředí operovat bez nutnosti zásahu lidského operátora. Ostatně Velox již byl představen před nějakou dobou, ale Pliant Energy Systems ho neustále vylepšují, a tak nyní opět ukázali svůj pokrok. Pořád jde ale pouze o koncept s tím, že do reálného provozu ho bude potřeba ještě vyladit.
Nepřehlédněte:






